[2026-5] [Invited Talk]
Dr. Lirong Xiang delivered a talk at the Embodied AI Virtual Summit organized by Cisco Research.
[2026-5] [Guest Lecture]
Dr. Lirong Xiang was invited to deliver a guest lecture for UC Davis EBS 290 (Graduate Seminar in Biological Systems Engineering).
[2026-4] [Award]
Ph.D. student Xingjian Li won 2nd place at the 17th Annual Biological and Environmental Engineering Research Symposium.
[2026-4] [Guest Lecture]
Dr. Lirong Xiang was invited to deliver a guest lecture for UGA ENGR 8990 (Advanced Topics in Engineering: Machine and Computer Vision for Engineers).
[2026-3] [Invited Talk]
Dr. Lirong Xiang delivered a talk at the Raymond F. Baker Plant Breeding Symposium at Iowa State University.
[2026-3] [Student Achievement]
Ph.D. student Weilong He received the Cornell Atkinson Graduate Research Grant. Congratulations!
[2026-3] [Seminar Talk]
Dr. Lirong Xiang presented at the Cornell Robotics Seminar titled “From Lab to Field: Bridging Physical AI, Digital Twins, and Domain-Aware Robotics for Real-World Deployment.”
[2026-2] [Service]
Dr. Lirong Xiang served as a judge at the Cornell CIDA Hackathon.
[2026-2] [Invited Talk]
Dr. Lirong Xiang delivered a seminar at the University of Florida Institute of Food and Agricultural Sciences (IFAS) AI and Data Science Seminar Series.
[2025-12] [Symposium]
Dr. Xiang is invited as a panelist at the CIDA Digital Agriculture Symposium to discuss “Robotics and Artificial Intelligence for Resilient Agriculture.”
[2025-12] [Research]
Our tomato disease project has been released. Learn more here.
[2025-11] [Invited Talk]
Dr. Xiang is invited to give a talk titled “Applications of Robotics and Artificial Intelligence in Plant Breeding and Genetics” at the
CANVAS 2025 Symposium,
Salt Lake City, UT.
[2025-10] [Conference] We presented our robot at the NERC Robotics Conference hosted at Cornell University!
[2025-9] [Invited Talk]
Dr. Xiang is invited to give a talk titled “Integrated AI and Robotics in Precision Agriculture” at Cornell AgriTech, Geneva, NY.
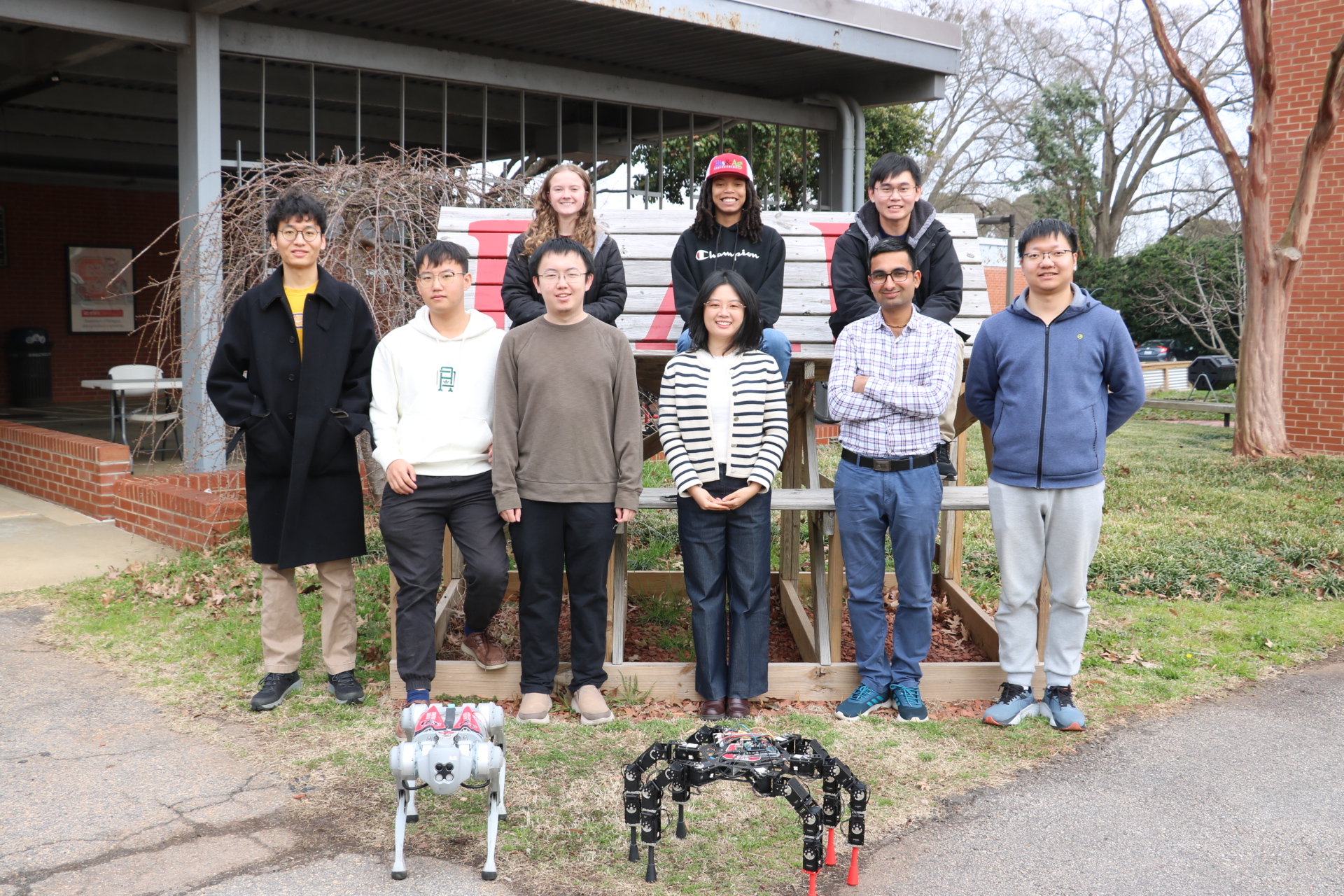
[2025-8] [Lab] Xiang’s lab is now based at Cornell University!
[2025-7] [Extension] Xiang's team demonstrated robotic phenotyping systems at the NC Tomato Field Day.!
[2025-7] [Award] Weilong received the Graduate Scholarly Achievement Award from AOCABFE. Congratulations!
[2025-7] [Award] Weilong received the Graduate Leadership and Service Award from AOCABFE. Congratulations!
[2025-7] [Award] Dr. Xiang received the Early Career Award from Association of Overseas Chinese Agricultural, Biological, and Food Engineers (AOCABFE). Congratulations!
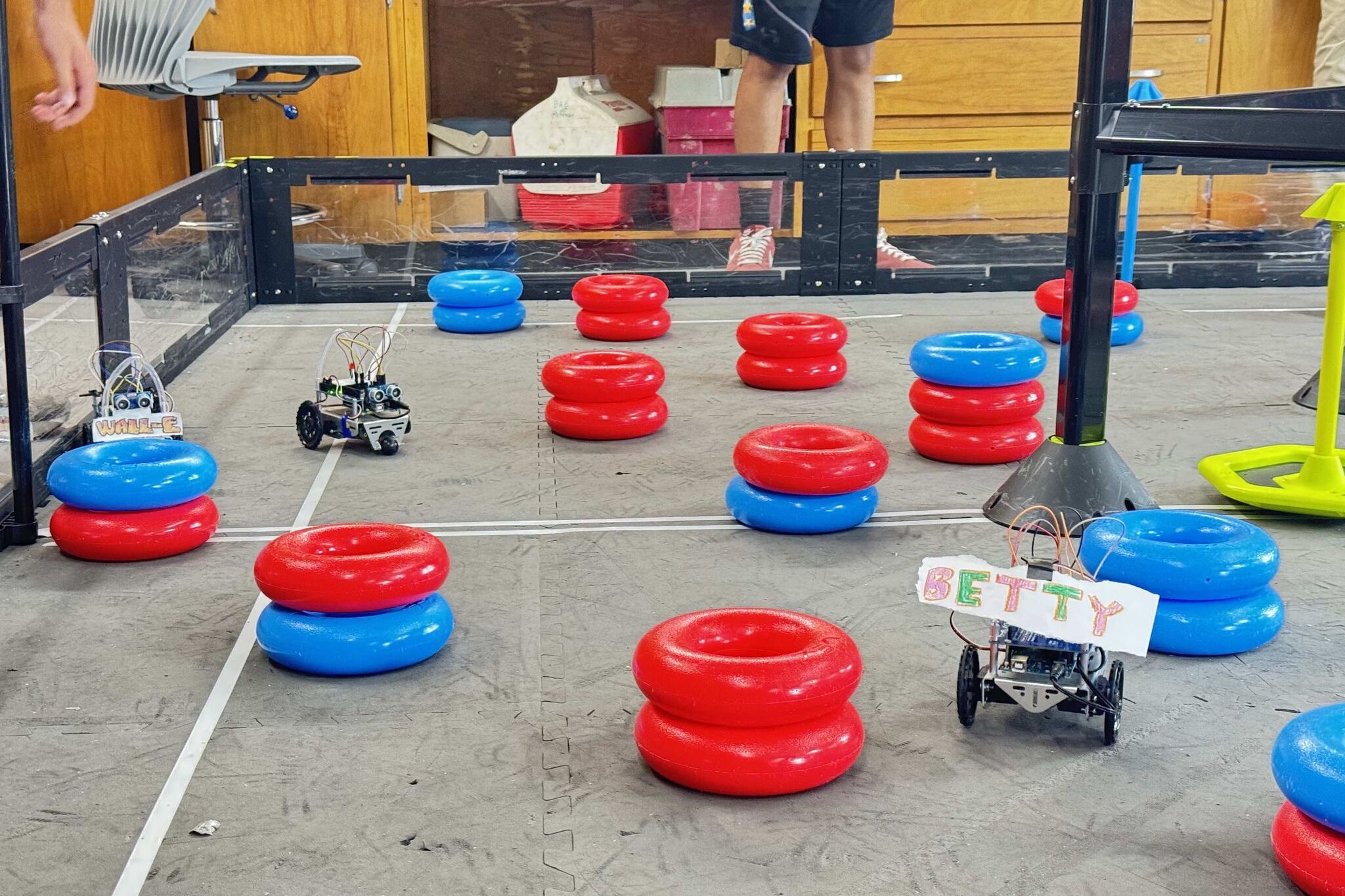
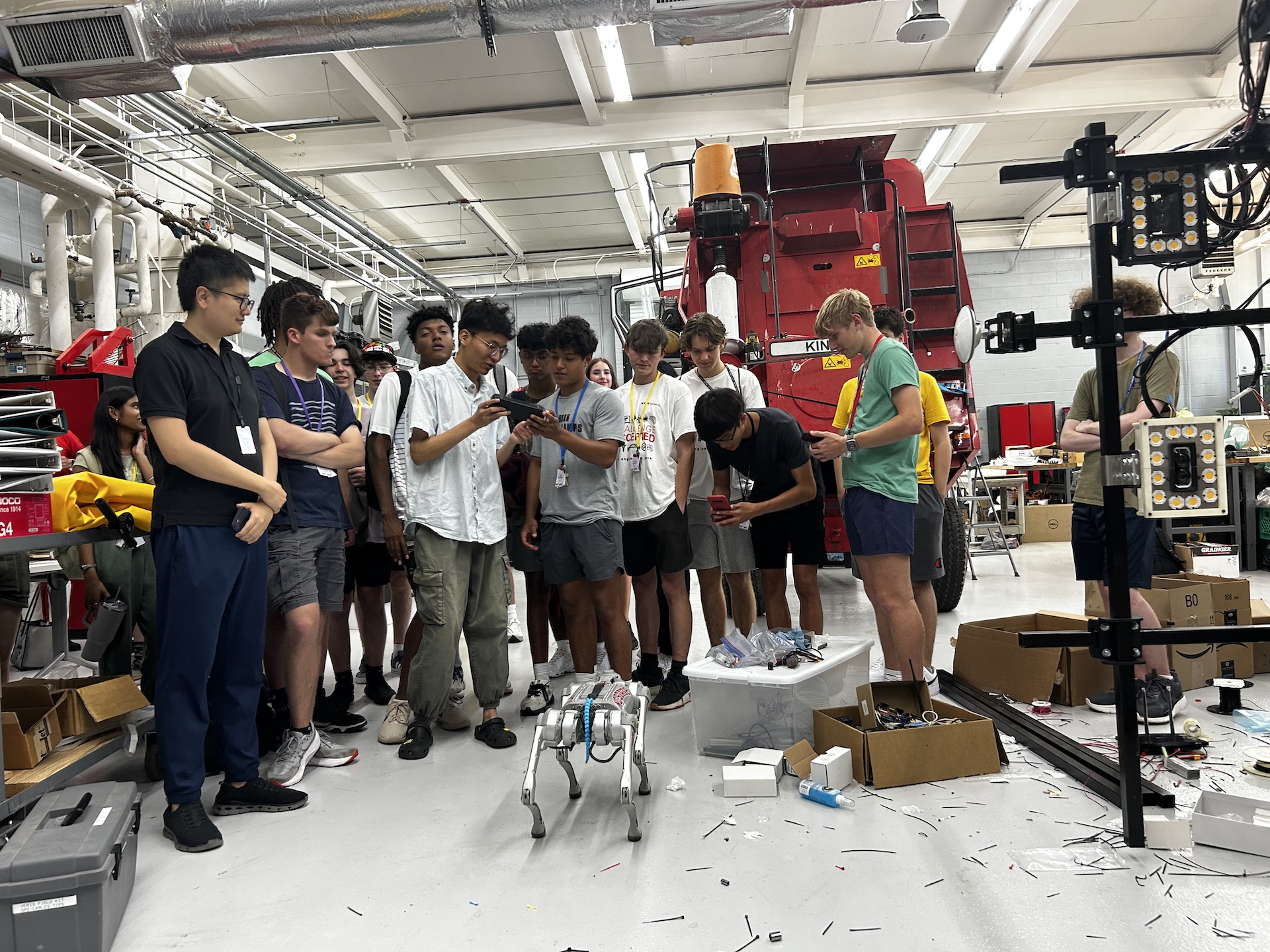
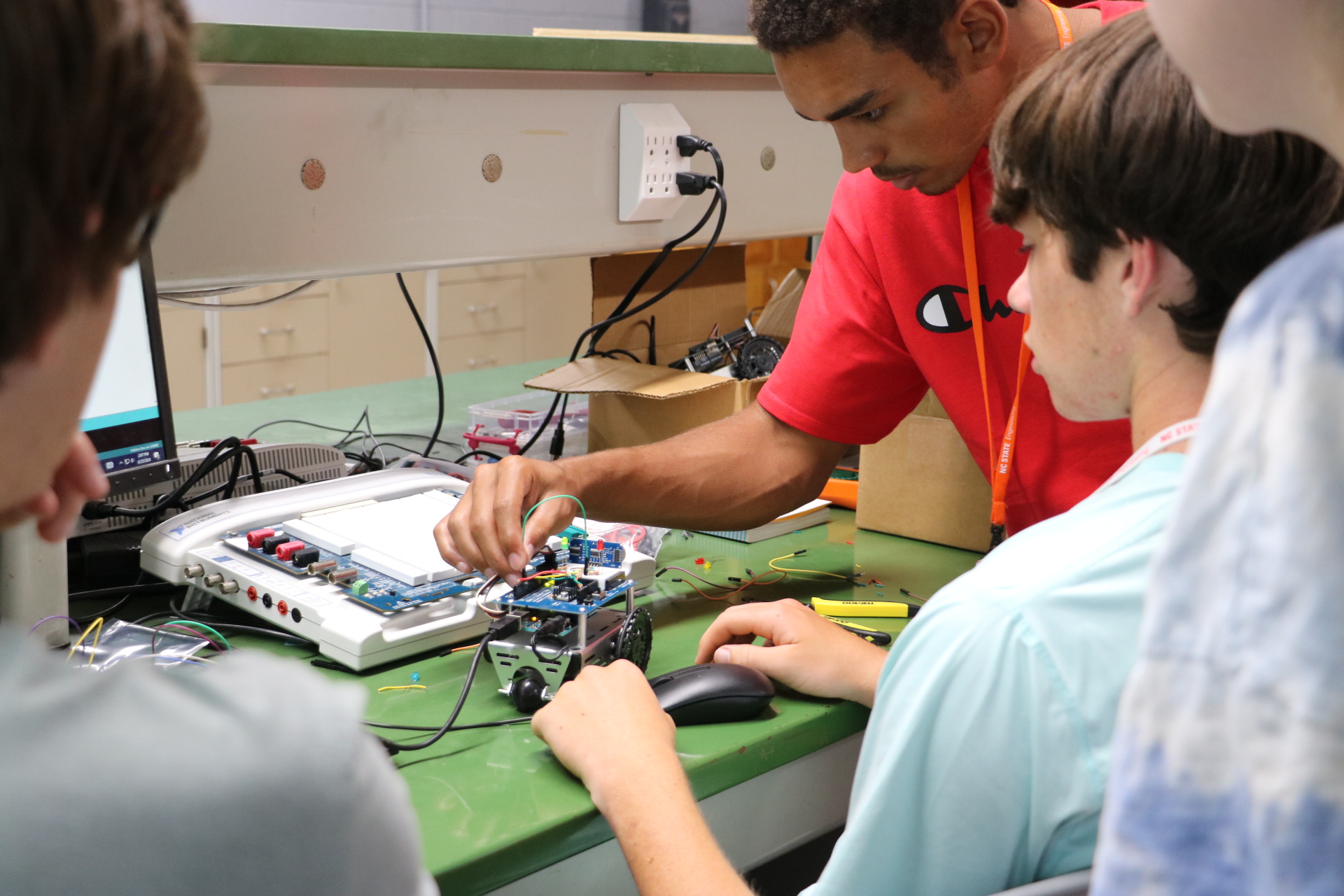
[2025-6] [Outreach] Dr. Xiang is leading a summer camp with Weilong and Alex for high school students.
[2025-5] [Competition] Our team secured third place at RMGC Picking in Clutter Challenge at 2025 ICRA conference!
[2025-4] [Award]
Weilong He won the prestigious NC State College of Engineering Doctoral Scholar of the Year. Congratulations!
[2025-4] [Award] Dr. Xiang received the department Outstanding Research Award. Congratulations!
[2025-4] [Award] Evelynn Wilcox won the prestigious National Science Foundation (NSF) Graduate Research Fellowship. Congratulations!
[2025-4] [Invited Talk] Dr. Xiang is invited to give a talk at the Genetic Engineering and Society (GES) Colloquium!
[2025-3] [Competition] Postdoc Dr. Prem Raj won 3rd place in the BAE Three-Minute Thesis Competition. Congratulations!
[2025-3] [Award] Dr. Xiang won the Food and Agriculture Research (FFAR) New Innovator Award. Congratulations!
[2025-3] [Service] Dr. Xiang is invited as a panelist for the Career Paths Panel at the ASPB Southern Section Regional Meeting.
[2025-1] [Award] Weilong He was named Rising Seed Star in 2025. Congratulations!
[2024-12] [Award] Congrats to Dr. Xiang for being named NC State 2024-25 class of Goodnight Early Career Innovators!
[2024-9] [Invited Talk] Dr. Xiang is invited to give a talk at Philippine Rice Research Institute!
[2023-5] [Funding] Our project about tomato disease is funded by USDA-NIFA. Cheers!
[2024-8] [Research] Weilong's work about plant phenotyping is featured in CALS Magazine. Cheers!
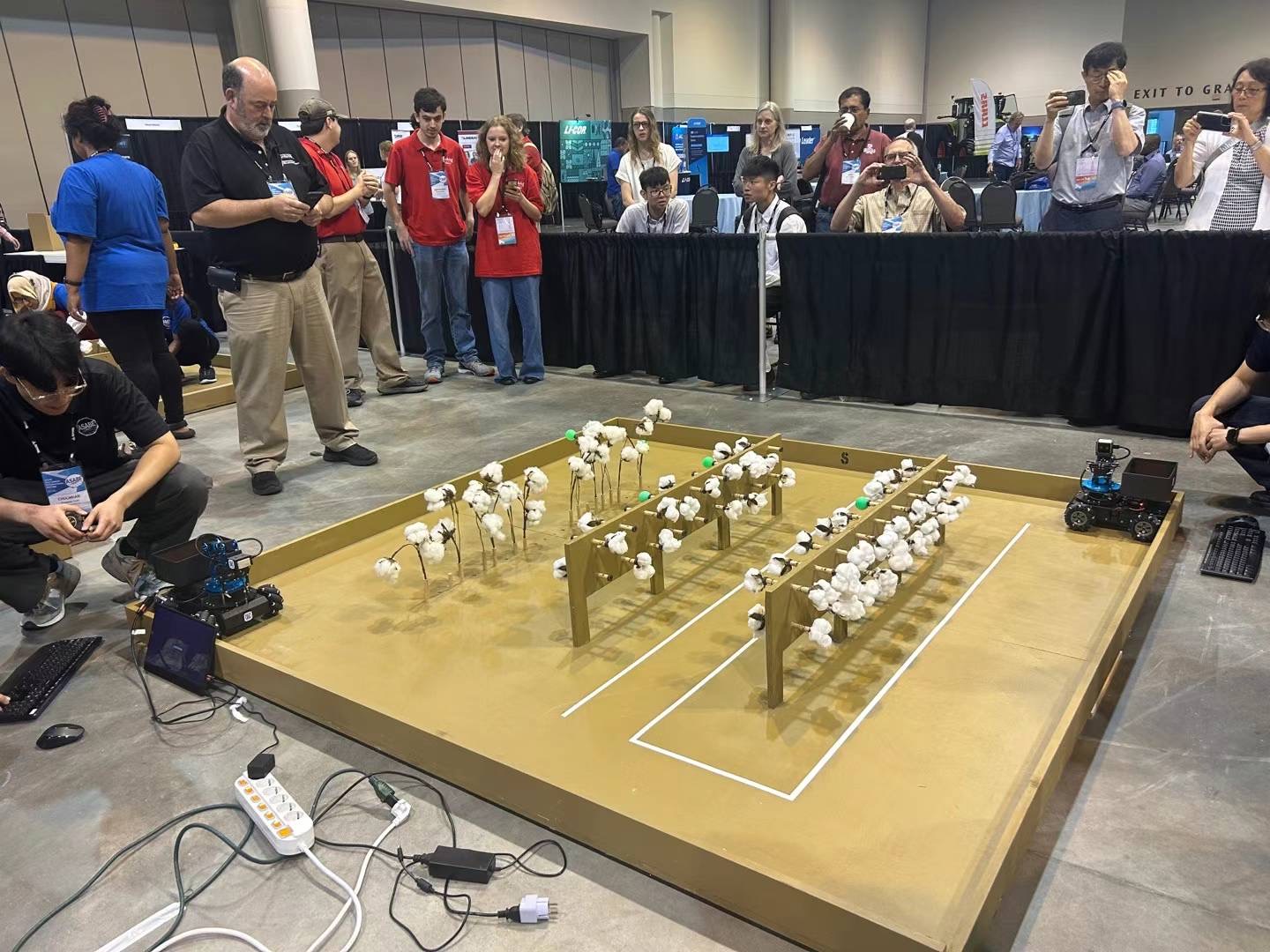
[2024-8] [Competition] Our robotics team, WolfAdvance, won first place in the advanced division at the 2024 ASABE Robotics Competition! Congratulations!
[2024-8] [Competition] Our robotics team, RoboPack, won third place in the standard division at the 2024 ASABE Robotics Competition! Congratulations!
[2024-7] [Research] Our work collaborating with Dr. Lina Quesada is featured in NC State News!
[2024-7] [Research] Our work collaborating with Dr. Chris Reberg-Horton is featured on ABC11 Raleigh-Durham!
[2024-4] [Extension] We will lead a summer camp for high school students. More details at Residential Programs for Rising 11th/12th Grade Students. Join us for agricultural robotics!
[2024-3] [Service] Dr. Xiang is visiting University of Moldova as part of the NC State delegation.
[2024-9] [Invited Talk] Dr. Xiang is invited to give a talk at Corn Breeding Research Meeting in Raleigh, NC!
[2024-1] [Service] Dr. Xiang serves as a guest editor for Computers and Electronics in Agriculture. Welcome to submit your work here!
[2024-1] [Competition] Zhenghua and Weilong won the Best Prototype Award at NC State’s Sustainability Innovation Competition, Make-A-Thon. Congrats!
[2023-9] [Award] Weilong He received the Norma L. Trolinder N.C. Plant Sciences Initiative Graduate Student Endowment Award. Congratulations!
[2023-8] [Lab] Welcome Zhenghua Zhang to AR Lab!
[2023-7] [Competition] Our robotics team won first place in the 2023 ASABE Robotics Competition! Congratulations to Team RoboPack!
[2023-7] [Competition] Weilong He won 3rd place in the AOCABFE Student Paper Competition. Congratulations!
[2023-6] [Extension] Dr. Xiang is leading a summer camp for high school students. Biological and Agricultural Engineering Summer Workshops Empower Students for the Future!
[2023-5] [Funding] Our project is funded by Chancellor's Innovation Fund. Cheers!
[2024-9] [Invited Talk] Dr. Xiang is invited to give a talk at Pickle Packers International Conference!
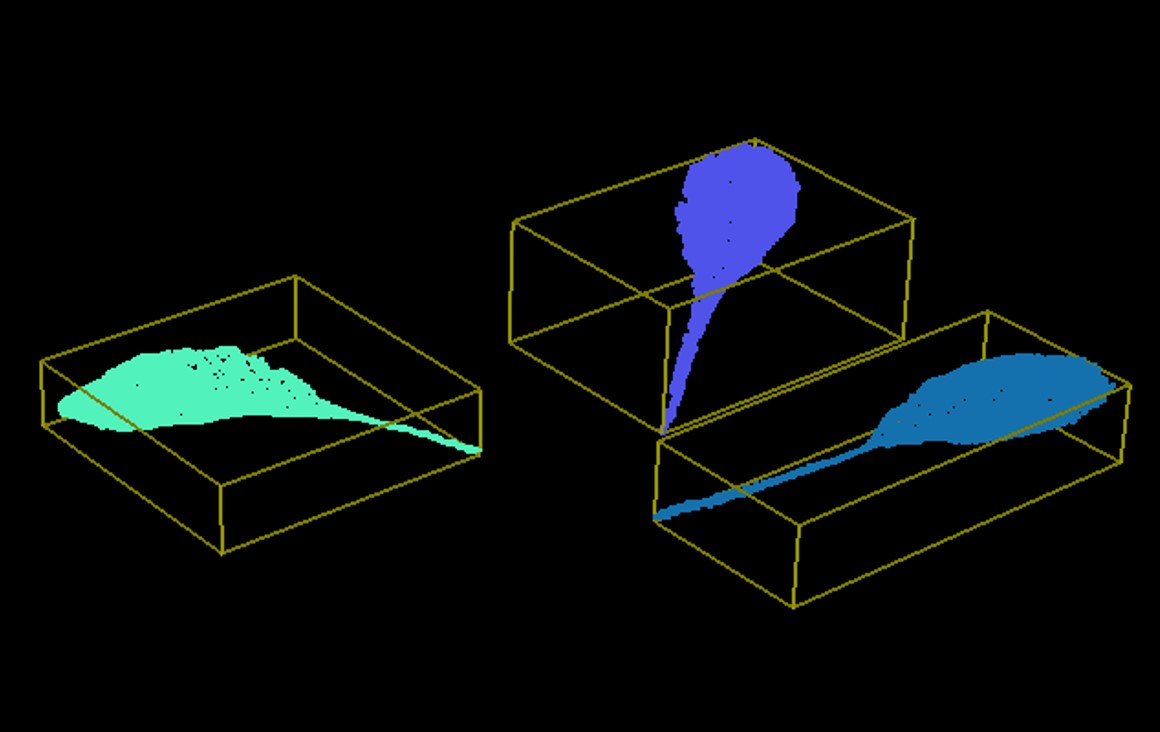
[2023-4] [Research] Our work about robotic plant phenotying was highlighted in the NSF newsletter!
[2023-1] [Lab] Welcome Weilong He to AR Lab!
[2023-1] [Funding] Our project is funded by Cotton Inc. Cheers!
[2022-8] [Lab] Dr. Xiang joined NC State as an Assistant Professor!